
그림과 같은 시스템이 안정하게 될 이득 K의 범위를 근궤적법을 써서 구함.
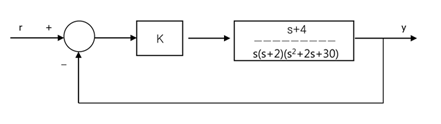
Matlab을이용하면 쉽게 다항식 계산과 근궤적Root Locus을 확인 할 수 있으므로 Matlab을 열어서 다음과 같은 명령을 내린다.
>> num=[1,4];den=conv([1,2,0],[1,2,30]);sys=tf(num,den);rlocus(sys)
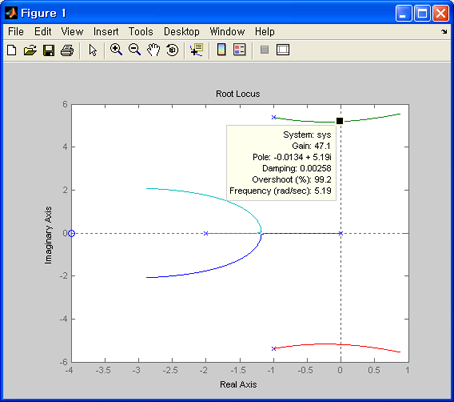
>> k=0:0.1:100;rlocus(num,den,k)
밑의 Root Locus를 보면 대략 Gain 값이 47정도된다. 그러므로 이 시스템은 이 값을 넘어가면 불안정하게 되는 것이다.
허수축을 기준으로 시스템의 안정성의 임계점이라 할 수 있다. 즉, 제어시스템의 해석 및 설계에 중요한 부분.
| 번호 | 제목 | 글쓴이 | 날짜 | 조회 수 |
|---|---|---|---|---|
| 5 |
PID제어기_1차시스템설계
[1] | Pjk | 2010.12.16 | 26726 |
| 4 |
Matlab을 이용하여 모터 위치제어를위한 PID제어기 설계
[8] | Pjk | 2010.06.09 | 42616 |
| 3 |
2차시스템 : PD제어기
[2] | Pjk | 2010.05.07 | 39585 |
| » |
근궤적(Root Locus)과 설계응용- 근궤적에서 시스템의 안정범위 확인.
| Pjk | 2010.05.02 | 32920 |
| 1 |
Matlab을 이용한 - 근궤적작도
| makersweb | 2010.04.09 | 36362 |
