
그림과 같은 시스템이 안정하게 될 이득 K의 범위를 근궤적법을 써서 구함.
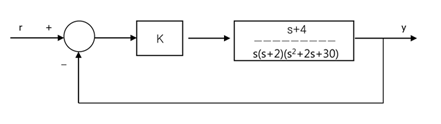
Matlab을이용하면 쉽게 다항식 계산과 근궤적Root Locus을 확인 할 수 있으므로 Matlab을 열어서 다음과 같은 명령을 내린다.
>> num=[1,4];den=conv([1,2,0],[1,2,30]);sys=tf(num,den);rlocus(sys)
>> k=0:0.1:100;rlocus(num,den,k)
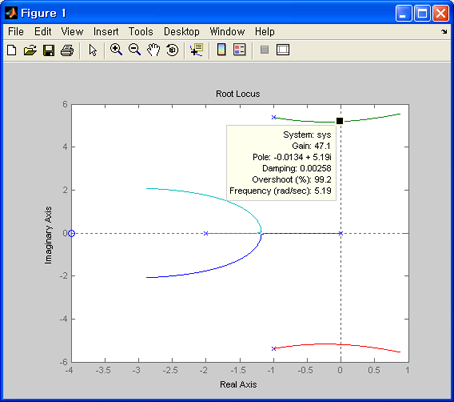
밑의 Root Locus를 보면 대략 Gain 값이 47정도된다. 그러므로 이 시스템은 이 값을 넘어가면 불안정하게 되는 것이다.
허수축을 기준으로 시스템의 안정성의 임계점이라 할 수 있다. 즉, 제어시스템의 해석 및 설계에 중요한 부분.
| 번호 | 제목 | 글쓴이 | 날짜 | 조회 수 |
|---|---|---|---|---|
| 20 |
수동식 wintch의 설계
[1] | Pjk | 2010.06.01 | 27048 |
| 19 |
공작기계의 열변형 대책
[1] | Pjk | 2010.05.28 | 24164 |
| 18 |
신.재생에너지-연료전지
| Pjk | 2010.05.27 | 19240 |
| 17 |
탄소강의 변태-공석강, 아공석강,과공석강
[2] | Pjk | 2010.05.20 | 115755 |
| 16 |
공구 재료 종류와 업계동향
| Pjk | 2010.05.12 | 27278 |
| 15 |
2010년 기계설계산업기사 2회필기 기출문제
| Pjk | 2010.05.10 | 30549 |
| 14 |
2차시스템 : PD제어기
[2] | Pjk | 2010.05.07 | 39983 |
| 13 |
풍력에너지
[1] | Pjk | 2010.05.07 | 23103 |
| » |
근궤적(Root Locus)과 설계응용- 근궤적에서 시스템의 안정범위 확인.
| Pjk | 2010.05.02 | 33486 |
| 11 |
재료의성질-공식
| Pjk | 2010.04.29 | 34161 |
| 10 |
30º사다리꼴 나사의 호칭
| Pjk | 2010.04.23 | 34730 |
| 9 |
칩과 공구의 절삭온도분포
| Pjk | 2010.04.21 | 29543 |
| 8 |
Screw Jack (나사잭) 설계
| Pjk | 2010.04.17 | 49238 |
| 7 |
Matlab을 이용한 - 근궤적작도
| makersweb | 2010.04.09 | 36872 |
| 6 | Hardness Test-경도시험기 측정원리와 특징 및 주의점 | Pjk | 2010.04.02 | 32934 |
| 5 |
Fe-Fe3C 평행상태도
| Pjk | 2010.03.30 | 42112 |
| 4 |
점성계수와점도계종류
| Pjk | 2010.03.30 | 45299 |
| 3 | 차원과 단위의 정의 | Pjk | 2010.03.30 | 30444 |
| 2 | 경도시험기 로크웰, 브리넬, 비커스, 쇼어 경도 환산표 | Pjk | 2010.03.30 | 33492 |
| 1 | 금속재료의 기계적 경도측정 시험법 | Pjk | 2010.03.30 | 24381 |
