
2차시스템 : PD제어기
PD제어란 오차신호를 미분하여 제어신호를 만들어내는 미분제어를 비례제어에 병렬로 연결하여 사용하는 제어기법이다.
비례제어 부분과 더불어 미분제어를 함게 쓴다는 뜻에서 이 기법에 의한 제어기를 비례미분 제어기(proportional-derivative controller), 또는 영문자를 써서 PD제어기라 부른다. 아래의 블록선도는 플랜트에 PD제어기를 연결한 피드백(되먹임) 제어 시스템을 보여주고있다.
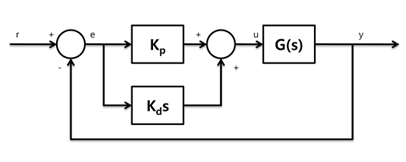
오차신호와 제어신호 사이의 전달함수로 표시되는 PD제어기의 전달함수는 다음과 같은 식으로 나타낼 수 있다.
C(s) = Kp + Kds
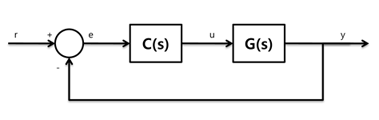
식. PD제어기를 포함하는 되먹임제어시스템.
여기서 Kp 는 비례계수, Kd 는 미분계수이다.
2차 시스템에 대한 예
| C(s) = Kp+ Kds |
|
1 G(s) = ㅡㅡㅡㅡㅡㅡㅡ s2+3s+2 |
closed loop T.F (폐루프시스템)

Kp증가시 빠른응답속도, 감쇠비는 감소 (초과커짐)
Kd증가시 감쇠비 증가(초과 작아짐)
위의 예제를 이용한 시간응답특성을 Matlab 으로 해석 및 설계할 수 있다. 우선,
* t=0:0.01:4 시간을 0초부터 4초까지 0.01간격으로표시 명령
*step(num,den) 여기서 'step'은 계단응답으로 단위계단 입력에 대한 시간응답특성을 보여준다. 또 'num'과 'den'은
대상전달함수의 분자부와 분모부의 계수들을 내림차순으로 나타내는 행벡터열이다.
>> kp=100; kd=0; num=[kd,kp]; den=[1,3+kd,kp+2]; t=0:0.01:4; step(num,den,t)
>> hold on
>> kp=100; kd=5; num=[kd,kp]; den=[1,3+kd,kp+2]; t=0:0.01:4; step(num,den,t)
>> kp=100; kd=10; num=[kd,kp]; den=[1,3+kd,kp+2]; t=0:0.01:4; step(num,den,t)
>> kp=100; kd=50; num=[kd,kp]; den=[1,3+kd,kp+2]; t=0:0.01:4; step(num,den,t)
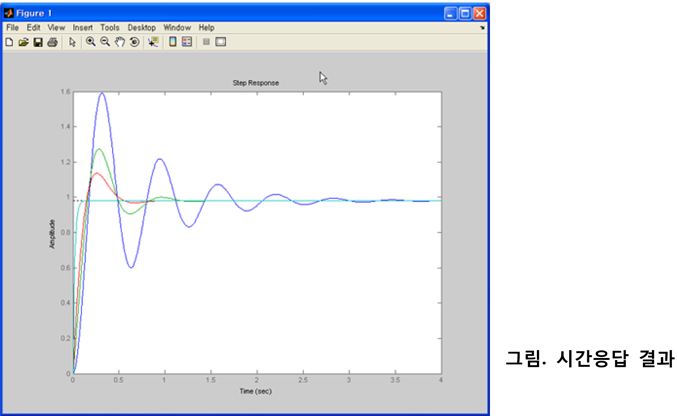
그러면 그림에서 보는바와 같이 시간응답특성을 확인할 수 있다.
| 번호 | 제목 | 글쓴이 | 날짜 | 조회 수 |
|---|---|---|---|---|
| 20 |
수동식 wintch의 설계
[1] | Pjk | 2010.06.01 | 27188 |
| 19 |
공작기계의 열변형 대책
[1] | Pjk | 2010.05.28 | 24264 |
| 18 |
신.재생에너지-연료전지
| Pjk | 2010.05.27 | 19397 |
| 17 |
탄소강의 변태-공석강, 아공석강,과공석강
[2] | Pjk | 2010.05.20 | 115886 |
| 16 |
공구 재료 종류와 업계동향
| Pjk | 2010.05.12 | 27378 |
| 15 |
2010년 기계설계산업기사 2회필기 기출문제
| Pjk | 2010.05.10 | 30662 |
| » |
2차시스템 : PD제어기
[2] | Pjk | 2010.05.07 | 40075 |
| 13 |
풍력에너지
[1] | Pjk | 2010.05.07 | 23210 |
| 12 |
근궤적(Root Locus)과 설계응용- 근궤적에서 시스템의 안정범위 확인.
| Pjk | 2010.05.02 | 33637 |
| 11 |
재료의성질-공식
| Pjk | 2010.04.29 | 34249 |
| 10 |
30º사다리꼴 나사의 호칭
| Pjk | 2010.04.23 | 34859 |
| 9 |
칩과 공구의 절삭온도분포
| Pjk | 2010.04.21 | 29700 |
| 8 |
Screw Jack (나사잭) 설계
| Pjk | 2010.04.17 | 49402 |
| 7 |
Matlab을 이용한 - 근궤적작도
| makersweb | 2010.04.09 | 36979 |
| 6 | Hardness Test-경도시험기 측정원리와 특징 및 주의점 | Pjk | 2010.04.02 | 33074 |
| 5 |
Fe-Fe3C 평행상태도
| Pjk | 2010.03.30 | 42187 |
| 4 |
점성계수와점도계종류
| Pjk | 2010.03.30 | 45406 |
| 3 | 차원과 단위의 정의 | Pjk | 2010.03.30 | 30601 |
| 2 | 경도시험기 로크웰, 브리넬, 비커스, 쇼어 경도 환산표 | Pjk | 2010.03.30 | 33647 |
| 1 | 금속재료의 기계적 경도측정 시험법 | Pjk | 2010.03.30 | 24493 |
